
Detección y localización automática de defectos visuales en los paneles solares
Hito 4.1. Mapa visual de la planta fotovoltaica
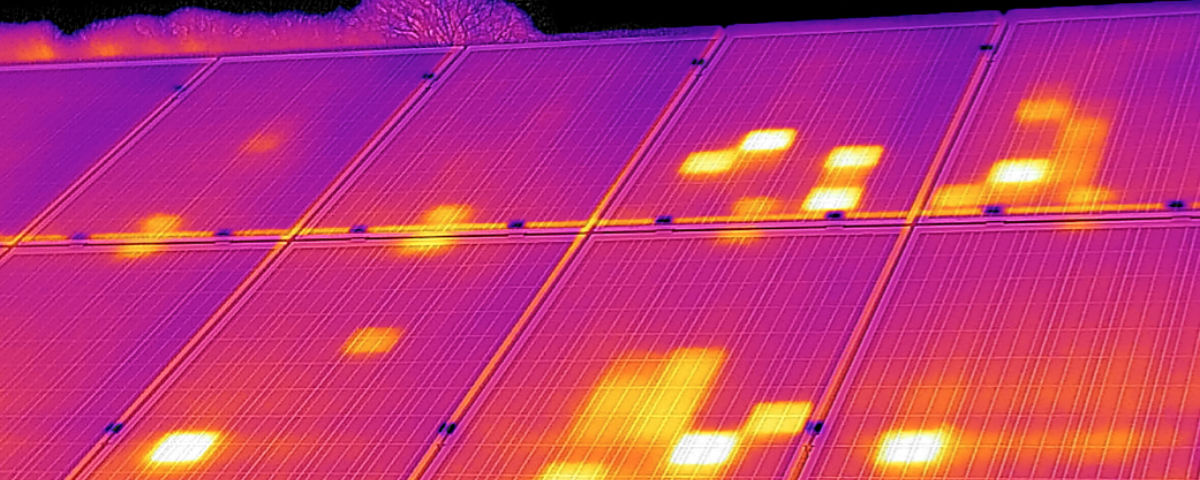
Las imágenes adquiridas deben ser procesadas para obtener un plano visual de toda la planta, tanto en visible, como en infrarrojo, de manera que cada una de las imágenes individuales pueda ser localizada en plano y por tanto correlados sus datos con los suministrados por el sistema IoT
Tareas a desarrollar
- Cosido de imágenes (“Stiching”). Para ello se realizará una corrección de perspectiva y aberraciones de lente de cada imagen, se enmascaran las partes repetitivas visualmente de los paneles, y se realizará un casamiento por características visuales de las zonas significativas de la imagen
- Calibración y fusión de las imágenes del espectro visible con las imágenes termogràficas. Se diseñara un procedimiento y un software que permitan de manera cómoda calibrar de manera cómoda el posicionamiento relativo de ambas cámaras y su posterior fusión a nivel de pixel
- Conteo automático de paneles y celdas, para obtener un posicionamiento exacto de los datos obtenidos. Para ellos se mezclaran técnicas clásicas de Procesamiento de Imágenes con técnicas de Aprendizaje Maquina para segmentación semántica y detección de objetos visuales clave
Participantes: grupo de investigación CVAR-UPM
Hito 4.2. Detección de defectos visuales
El objetivo es detectar y localizar los defectos que se exterioricen visualmente en el espectro termográfico o visible, utilizando para ellos los resultados de la segmentación semántica de paneles realizados en el PT1
Tareas a desarrollar
- Recopilación de imágenes etiquetadas manualmente, para ello se hará uso del conocimiento de CEGADRONE, se redactarán las normas de etiquetado y se realizará la supervisión del etiquetado manual subcontratado a una empresa externa
- Desarrollo del sistema automático de detección con Aprendizaje Máquina (Machine Learning). Se desarrollará una Red Profunda (DL) adaptada al tipo de imágenes y defectos adquiridos y etiquetados en la tarea anterior
Participantes: grupo de investigación CVAR-UPM y empresa Cegadrone
Hito 4.3. Fusión visual con datos eléctricos de paneles
Los defectos visuales detectados en los anteriores paquetes de tareas tienen que correlarse con la información de campo suministrada por los sensores desplegados en el Objetivo 1 en tiempo real, mediante tecnología 5G o similar, propuesta en el Objetivo 2. Esta información es utilizada en la Optimización de la Energía del Objetivo 5. Adicionalmente cuando el IoT desplegado en el panel mida una anomalía en el rendimiento no detectada por las tecnologías anteriores (espectro visible e IR), se solicitara de forma autónoma una prueba mediante cámara de electroluminiscencia (EL).
Tareas a desarrollar
- Correlación de datos en tiempo real mediante comunicación drone con IoT del panel. Filtrado de la información de ambas fuentes en tiempo real para una evaluación precisa del estado actual de la planta
- Cierre del lazo de control óptimo del parque sobre la información adquirida por el drone. Realimentación de la información en tiempo real del drone para obtener una respuesta óptima del sistema
- Detección de errores en los paneles mediante cámara de electroluminiscencia, no detectables por otras tecnologías de visión. Para ello será el IoT del panel el que solicite esta prueba específica en el panel en concreto que lo necesite. Este tipo de prueba conlleva un intercambio de comunicaciones en tiempo real entre el IoT y el drone.
Participantes: grupo de investigación GEISER