3. Inspección del parque fotovoltaico mediante flota de drones
|
Tras los primeros 18 meses del proyecto COPILOT, se ha completado satisfactoriamente el PT3.1 y se ha iniciado el desarrollo científico técnico de los PT3.2 y PT3.3, pertenecientes al Objetivo 3. La realización del paquete de trabajo 3.1 da como resultado un nuevo software que permite la inspección de parques fotovoltaicos mediante flotas de drones y que se ha probado con resultados muy positivos en simulación. El software, llamado Aerostack2, es un framework modular para volar robots aéreos de manera autónoma. Es un software de código abierto y gratuito con licencia BSD-3-Clause. El código fuente está disponible en GitHub, dónde también se puede encontrar su documentación. |
Características principales de Aerostack2:
|
|
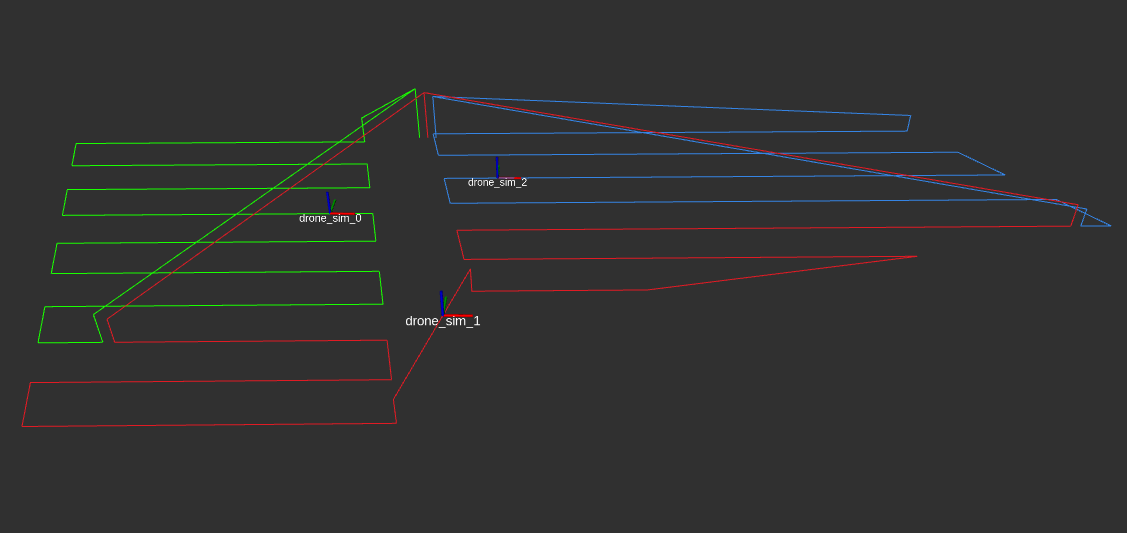
Módulo de planificador de misiones de enjambreAerostack2 incluye un módulo de planificador de misiones de enjambre (Tarea 3.1.1). El módulo actúa como un sistema de gestión de misiones y se encarga de la toma de decisiones, la asignación de tareas y la planificación de rutas. El sistema recibe comandos de alto nivel del operador, los traduce en un conjunto de puntos de referencia, calcula las mejores rutas y asigna la tarea para cada UAV optimizando el tiempo de ejecución de la misión. Enfoque multi-robotEl diseño de Aerostack2 sigue un enfoque multi-robot distribuido (Tarea 3.1.2). Está construido sobre el middleware ROS2 y su servicio de distribución de datos subyacente (DDS). Este middleware utiliza un servidor de descubrimiento dinámico y distribuido, lo que permite que dos programas (o drones) cualquiera se comuniquen sin la necesidad de un maestro centralizado. Esto hace que el sistema sea más flexible y tolerante a fallos. |
|
 |
|
|
|
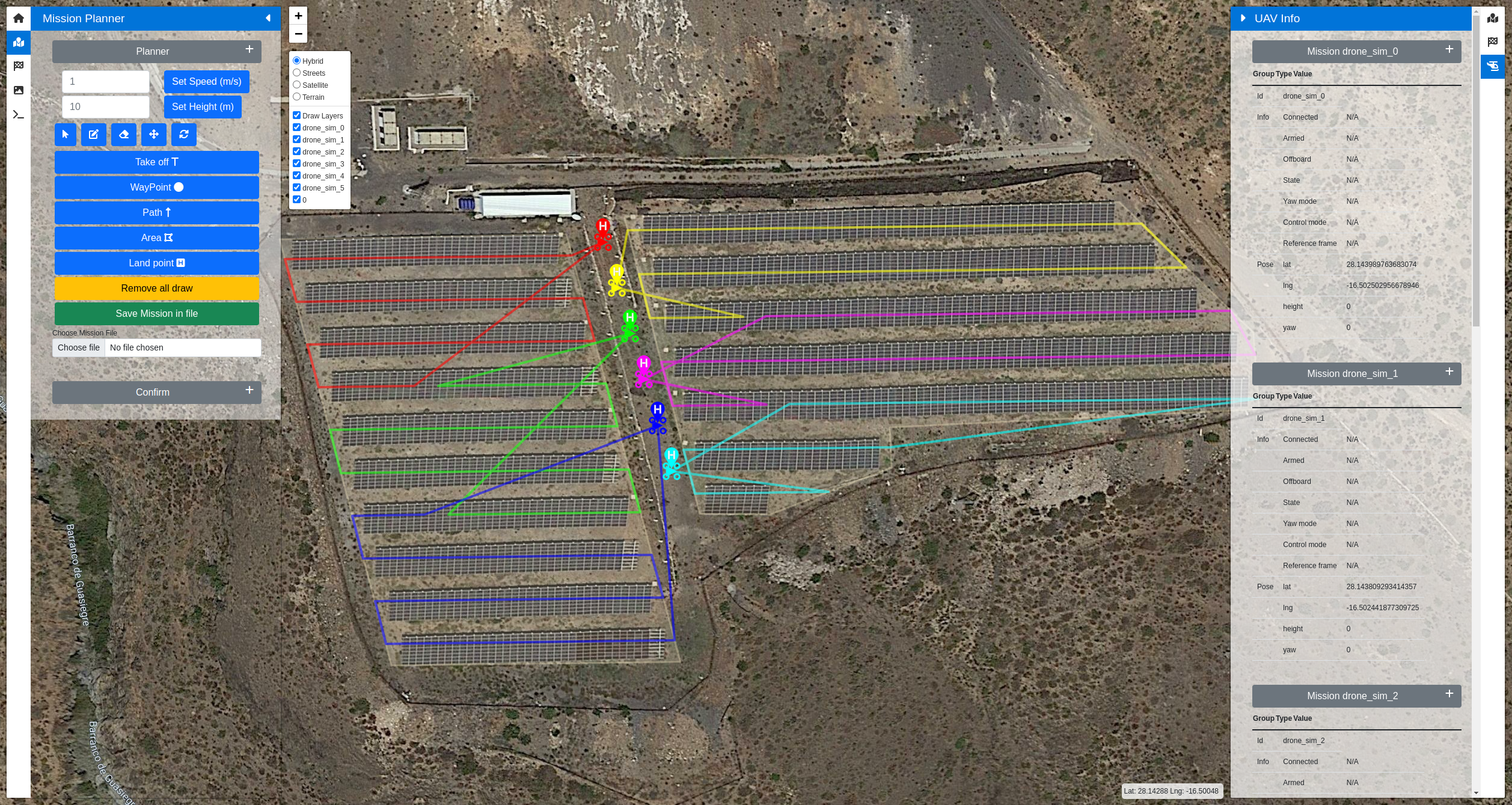
Planificador web de misiones multi-robotPara facilitar su uso en misiones de inspección aérea en exteriores, se ha desarrollado una interfaz gráfica de usuario web enfocada a la planificación de misiones multi-robot (Tarea 3.1.3). Esta permite la planificación de misiones tanto online como offline, la modificación de misiones durante el vuelo y la supervisión de las mismas. Además, integra el módulo de planificación de misiones en enjambre anteriormente descrito para facilitar su uso. Por último, las tecnologías web utilizadas para su desarrollo permiten un enfoque distribuido con múltiples clientes trabajando al mismo tiempo en diferentes dispositivos (PCs, móviles, tabletas, etc.). |
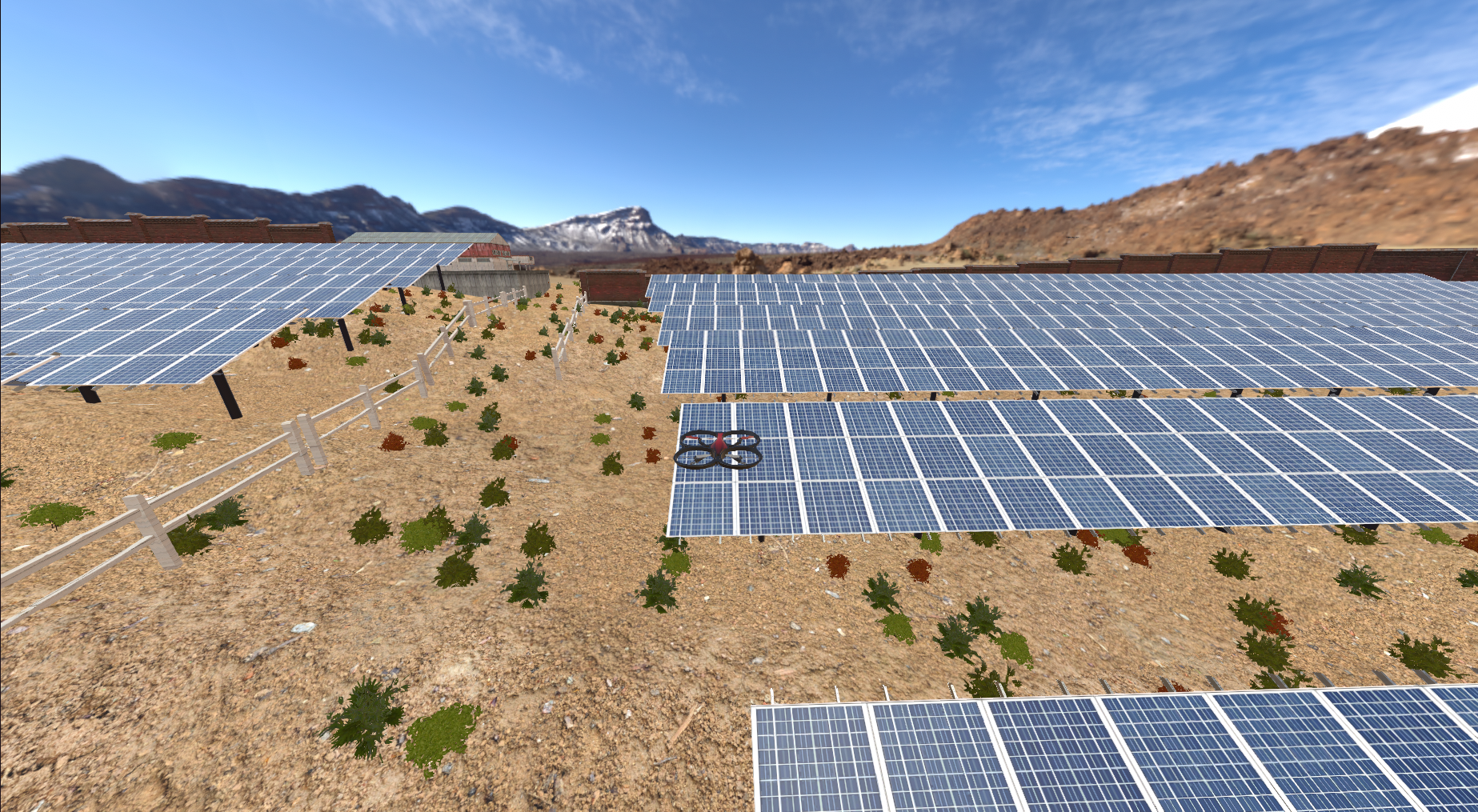
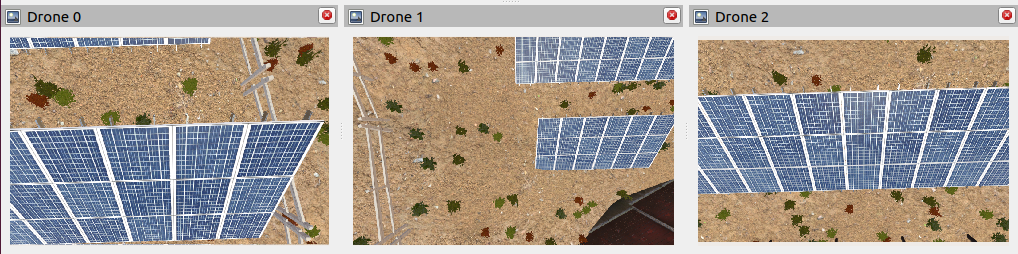
Entorno de simulaciónPara proporcionar una forma segura, controlada y eficiente de probar y evaluar el software, sin la necesidad de ensayos costosos y largos en tiempo en el mundo real, se ha creado un entorno simulado (Tarea 3.1.4). El entorno utiliza dos simuladores, el primero se ocupa de la física del mundo y del drone, mientras que el segundo proporciona una vista fotorrealista de una central fotovoltaica, lo que permite probar con una mejor aproximación a la realidad algunos algoritmos basados en imágenes. |
|
|
|
|