Realidad Aumentada
Introducción:
Dentro del proyecto “Gestión Documental y AR” que se esta desarrollando por parte de Mytra Control S.L. para SEAT hay una parte de detección de objetos.
El objetivo es poder detectar, con una Tablet, en tiempo real objetos de carácter industrial que se encuentran dentro de armarios, como pueden ser “ET200s”, “PN/PN Coupler”, “S7-300” etc, aplicando técnicas de visión artificial y aprendizaje máquina. De esta forma se puede verificar si el contenido teórico de los armarios industriales, a través de los planos de Eplan, coincide con el contenido real.
Algoritmos de detección de objetos
Se han utilizado tres grandes grupos de algoritmos para la detección de objetos que son los siguientes:
- Algoritmos básicos: Se detectan diferentes características básicas de objetos, como color de objeto, tamaño, número de etiquetas y el color de estas etc.
- Algoritmos “Matching Template”: Con estos algoritmos se trata de detectar los objetos que no se han detectado con los algoritmos anteriores. Se busca un objeto determinado comparándolo con un template. El problema de estos algoritmos es que requieren de mucho tiempo de computo por lo que no todos se pueden aplicar en tiempo real.
- Aprendizaje máquina: Los algoritmos de “ Matching Template” que se pueden aplicar en tiempo real dan muchos falsos positivos, por esa razón se intenta mejorar la detección de estos objetos con aprendizaje máquina.
La idea es sencilla, se requieren aproximadamente 500 imágenes donde se encuentre el objeto a detectar, con diferentes iluminaciones, ángulos etc . Por otro lado, se requieren 1500 imágenes donde no se encuentre el objeto a detectar, lo ideal es que en estas imágenes haya objetos del mismo estilo, el fondo del armario etc. Cuantas más imágenes tanto positivas como negativas se tenga mejor será el entrenamiento.
Resultados
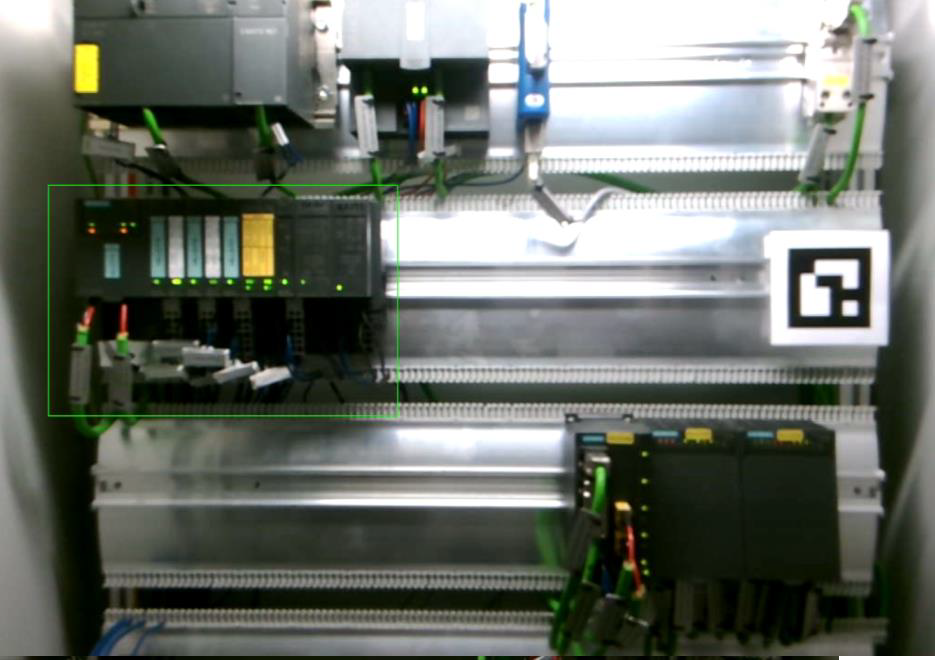
Los resultados obtenidos sobre diferentes armarios industriales se muestran a continuación.
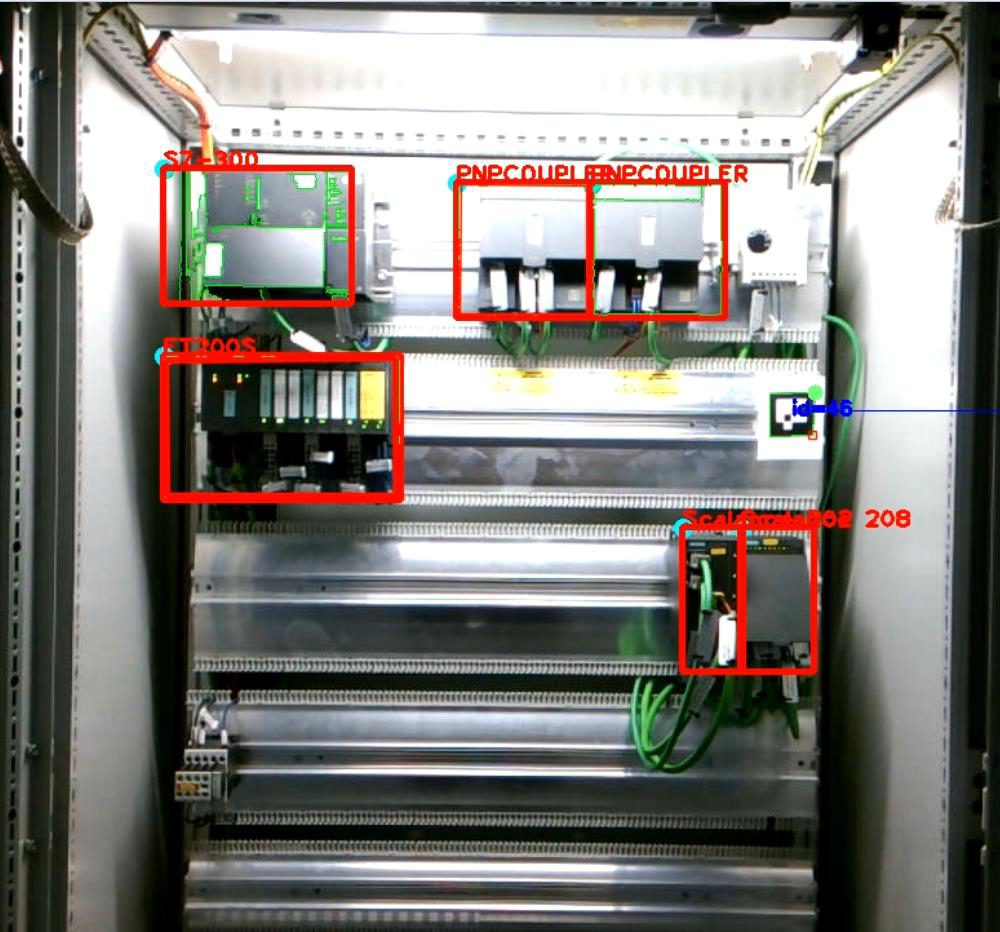
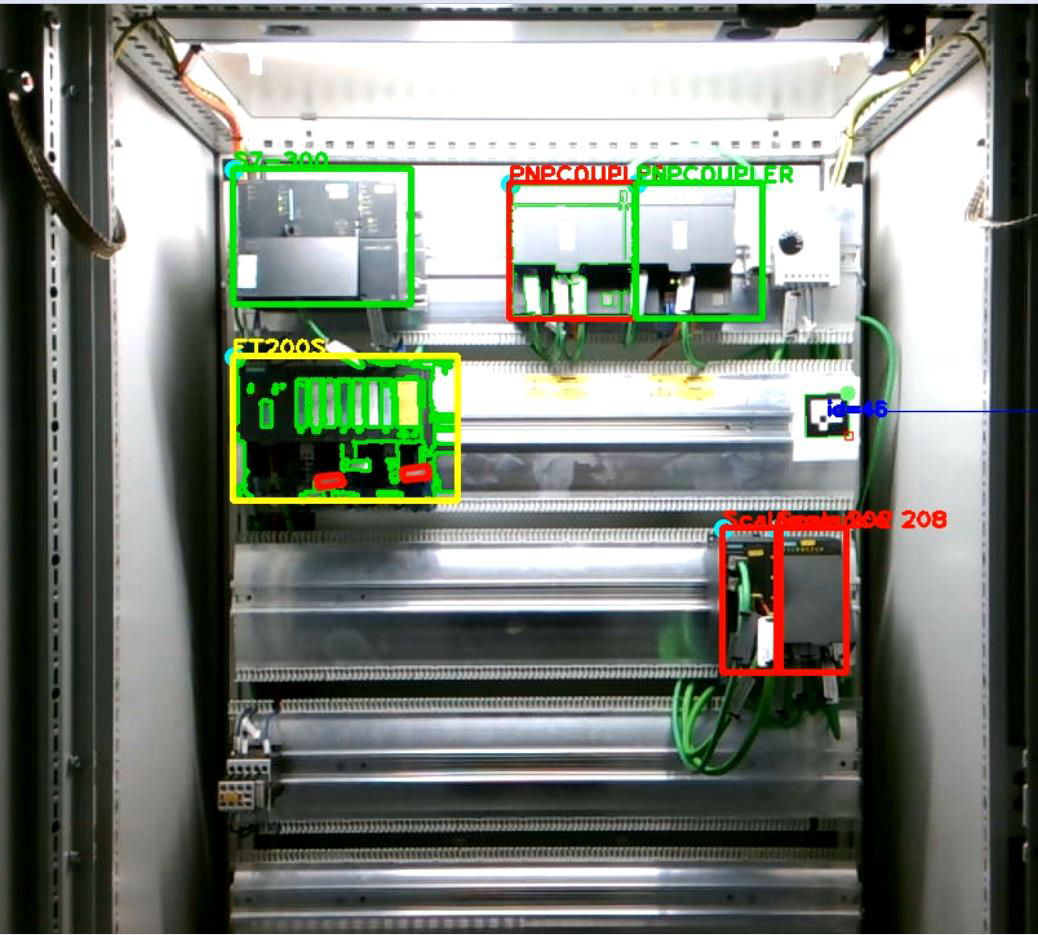
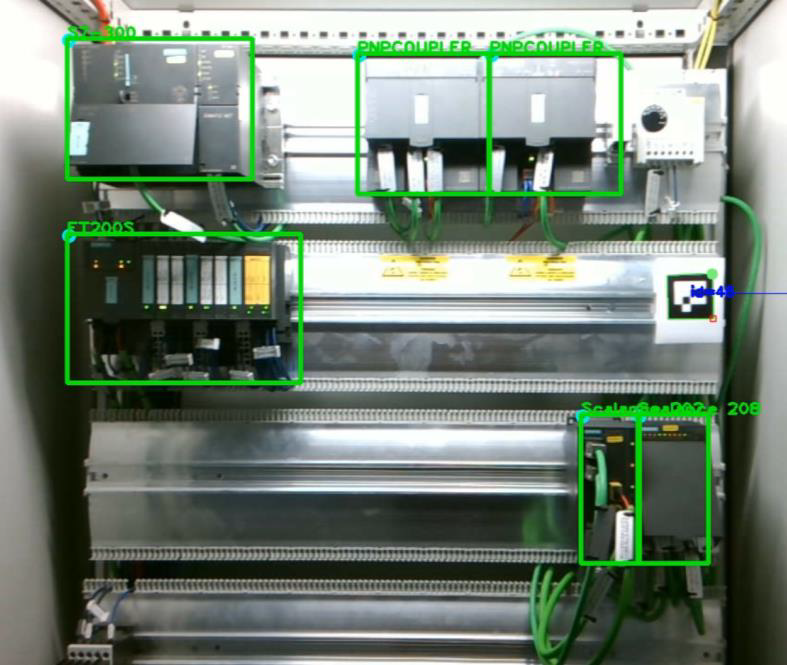
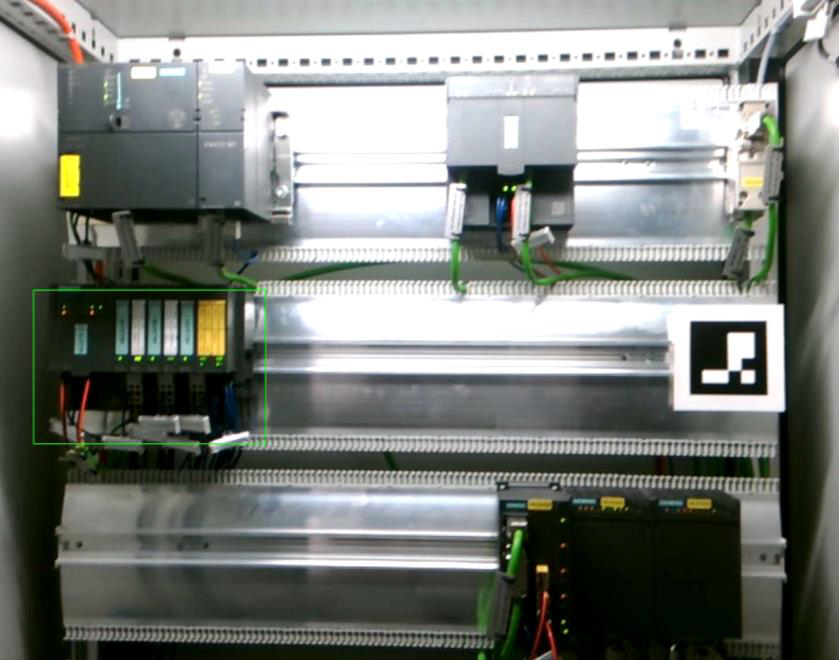
Aunque no se tarda mucho tiempo, menos de 10 segundos si la distancia a los objetos no es muy elevada, en detectar los diferentes objetos al principio no se detecta ningún objeto (recuadros de color rojo), trascurrido cierto tiempo se detectan todas las características de los objetos (recuadro de color verde) o algunas características (recuadro de color amarillo).
Conclusiones
Los resultados obtenidos son satisfactorios por lo que se puede concluir que se pueden detectar objetos industriales bajo las condiciones de trabajo normales aplicando técnicas de visión artificial. Bien es cierto que los mejores resultados se han obtenido aplicando aprendizaje máquina aunque esto requiere un gran esfuerzo en la toma de imágenes, por lo tanto, es necesario valorar si esta aplicación tiene sentido fuera del ámbito de la investigación.